

🧭 인트로: 모순을 해결하는 기술
지난 글에서 우리는 RKE와 롤링코드의 허점을 이론적으로 살펴봤습니다.
이론만 보면 RollJam은 꽤 “깔끔한” 아이디어입니다.
- 한 번 안 먹힌 코드(Code A)를 훔쳐서
- 두 번째 버튼을 누를 때 대신 써주고
- 그 사이에 다음 코드(Code B)를 훔쳐서 나중에 쓰는 공격.
문제는, 이걸 현실의 RF 환경에서 구현하려고 할 때입니다.
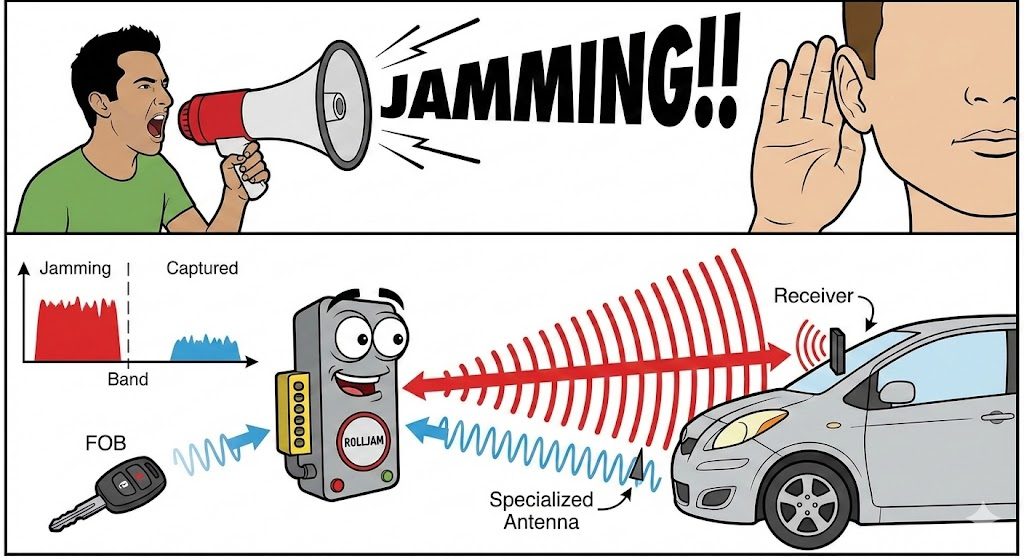
“내가 엄청 큰 소리(Jamming) 를 지르면서, 동시에 옆 사람의 귓속말(FOB 신호) 을 들을 수 있을까?”
무선 세계에서 Jamming은 말 그대로 강력한 잡음(Interference)을 뿌리는 행위입니다.
일반적으로는 내가 Jam을 세게 때리면 → 상대방 수신기는 물론이고, 내 수신기까지 같이 먹통이 되는 게 정상입니다.
Samy Kamkar는 이 물리적인 모순을 어떻게 우회했을까요?
“차량은 못 듣게 막으면서, 나는 그 신호를 캡처하는” 게 어떻게 가능했을까요?
이번 글에서는 RollJam의 기술적 구현 원리를
- RF/SINR 레벨
- 시퀀스 레벨
- 코드/상태 머신 레벨
에서 끝까지 해부해 봅니다.
2.1 공격의 핵심 전제: 신호 대 간섭 및 잡음 비(SINR)와 거리, 대역폭
먼저 물리 계층 관점에서 이 상황을 수식으로 한 번 써 보겠습니다.
차량 수신기가 보는 신호를 단순화하면:
$r_\text{car}(t) = s_\text{FOB}(t) + s_\text{jam}(t) + n(t)$
- $s_\text{FOB}(t)$: 사용자의 FOB에서 오는 유효 신호
- $s_\text{jam}(t)$: RollJam에서 뿌리는 Jam 신호
- $n(t)$: 환경 잡음(thermal noise, 기타 간섭 등)
차량이 패킷을 제대로 복원하려면, 의도적 간섭까지 포함한 SINR(Signal to Interference plus Noise Ratio) 가 일정 임계치 이상이어야 합니다.
$\mathrm{SINR}\text{car} = \frac{P\text{FOB}}{P_\text{jam}+P_n} \ge \gamma_\text{demod}$
RollJam이 하고 싶은 건 정반대입니다.
$\frac{P_\text{FOB}}{P_\text{jam}+P_n} \ll \gamma_\text{demod}$
즉, 차량 입장에서는 FOB 신호가 Jam에 완전히 묻혀서 해석 불가능해야 합니다.
반면, 공격자의 수신기(RollJam RX)가 보는 신호는:
$r_\text{RJ}(t) = s_\text{FOB}(t) + s'_\text{jam}(t) + n'(t)$
여기서 포인트는 두 가지입니다.
- 거리(거리 감쇠)와 안테나 배치
- 대역폭(Bandwidth)과 필터링 전략
2.1.1 거리(거리 감쇠)로 만든 “SINR 비대칭”
전파는 거리의 제곱에 반비례하여 세기가 줄어듭니다. (Friis 전송 방정식)
대충 감으로만 보면
- FOB → 차량: 예를 들어 10m
- RollJam → 차량: 차 바로 아래/옆에 설치, 0.5~1m
- FOB → RollJam: RollJam이 “차 근처”에 있다고 해도 FOB와 3~5m 정도 거리
정도로 설정할 수 있습니다.
이 상황에서:
- 차량 수신기 입장:
- Jammer(RollJam TX)는 바로 옆에서 세게 때리고,
- FOB는 멀리서 약하게 날아옵니다.
- $P_\text{jam} \gg P_\text{FOB}$인 상황.
- RollJam RX 입장:
- Jammer(TX)와 수신기(RX)는 안테나 분리 + 회로 설계로 어느 정도 격리.
- FOB는 상대적으로 충분한 세기로 들어옴.
- 무엇보다 RollJam은 자기가 뿌리는 Jam 파형을 알고 있어 (또는, 아예 Jam을 다른 주파수 대역/형태로 설계해) 신호 처리를 할 수 있습니다.
즉, 차량과 RollJam이 “같은 신호를 받는 게 아니다”가 핵심입니다.
- 차량: FOB + Jam + 잡음 → 대역폭도 넓고, 필터링도 “범용”
- RollJam RX: FOB + (알고 있는 형태의 Jam) + 잡음 → 좁은 대역, 공격자 특수 튜닝
2.1.2 대역폭 차이: “수신 윈도우”를 누가 더 공격적으로 최적화할 수 있나
Jam & Capture를 “수신기 관점”에서 보면 결국 싸움의 축은 하나입니다.
얼마나 넓은 주파수 구간을 ‘유효 신호’로 받아들이도록 설계/세팅되어 있느냐(= channel filter / receive window)
(1) 차량 수신기는 ‘현실적 허용오차’ 때문에 일정 폭의 수신 윈도우가 필요하다
차량 쪽 RKE 리시버는 현실적으로 아래를 감당해야 합니다.
- 발진기 편차/온도 변화에 따른 주파수 오프셋(드리프트)
- 환경 간섭, 다중경로 등으로 인한 채널 상태 변화
- (구현/시장에 따라) 동일 대역에서 다양한 송신 특성을 가진 키를 수용하는 경우
결국 차량 수신기는 “이상적으로 한 점만 보는 필터”가 아니라, 운용을 위해 어느 정도 폭을 가진 수신 윈도우를 갖는 쪽으로 설계되기 쉽습니다.
(2) 공격자는 “타깃 FOB 하나만” 잡으면 되니, 더 좁게 세팅할 여지가 있다
반대로 공격자는 단 하나의 FOB 신호만 안정적으로 잡으면 됩니다. 그래서 수신 체인을 더 공격적으로 튜닝할 수 있죠.
- 채널 필터 대역폭을 좁히면(narrower bandwidth) 필터가 통과시키는 잡음 전력(대략 $N \propto B$)이 줄고, 같은 신호 세기에서도 복조 관점의 여유(SINR)가 좋아지는 방향으로 갑니다.
이 “대역폭을 줄여 수신을 예민하게 만든다”는 건 추상적인 얘기가 아니라, 예를 들어 CC1101 같은 Sub-GHz 트랜시버도 채널 필터/설정에 따라 수신 특성이 달라진다는 식으로 문서화돼 있습니다.
(3) ‘살짝 빗겨 잼’이 나오는 이유: 같은 창 안에서 “차량만 더 힘들게” 만들고 싶기 때문
그래서 자주 언급되는 아이디어가, FOB 성분과 겹치되(차량 수신 윈도우 안), 공격자 쪽에선 상대적으로 분리/완화가 쉬운 형태로 간섭을 얹는 접근입니다.
다만 이건 튜닝 문제입니다.
- 너무 멀리 벗어나면 차량 수신 창 밖이라 간섭이 약해지고
- 너무 가까이/강하게 얹으면 공격자 캡처 품질도 같이 망가집니다.
여기서 결론은 단순합니다.
차량은 ‘운용을 위한 수신 윈도우’를 가져야 하고 공격자는 ‘타깃 1개 최적화’로 더 공격적인 세팅을 할 수 있다.
이 비대칭이 Jam & Capture 성립을 돕는다.
2.2 “듣는 동시에 막기” – Jam & Capture 전략
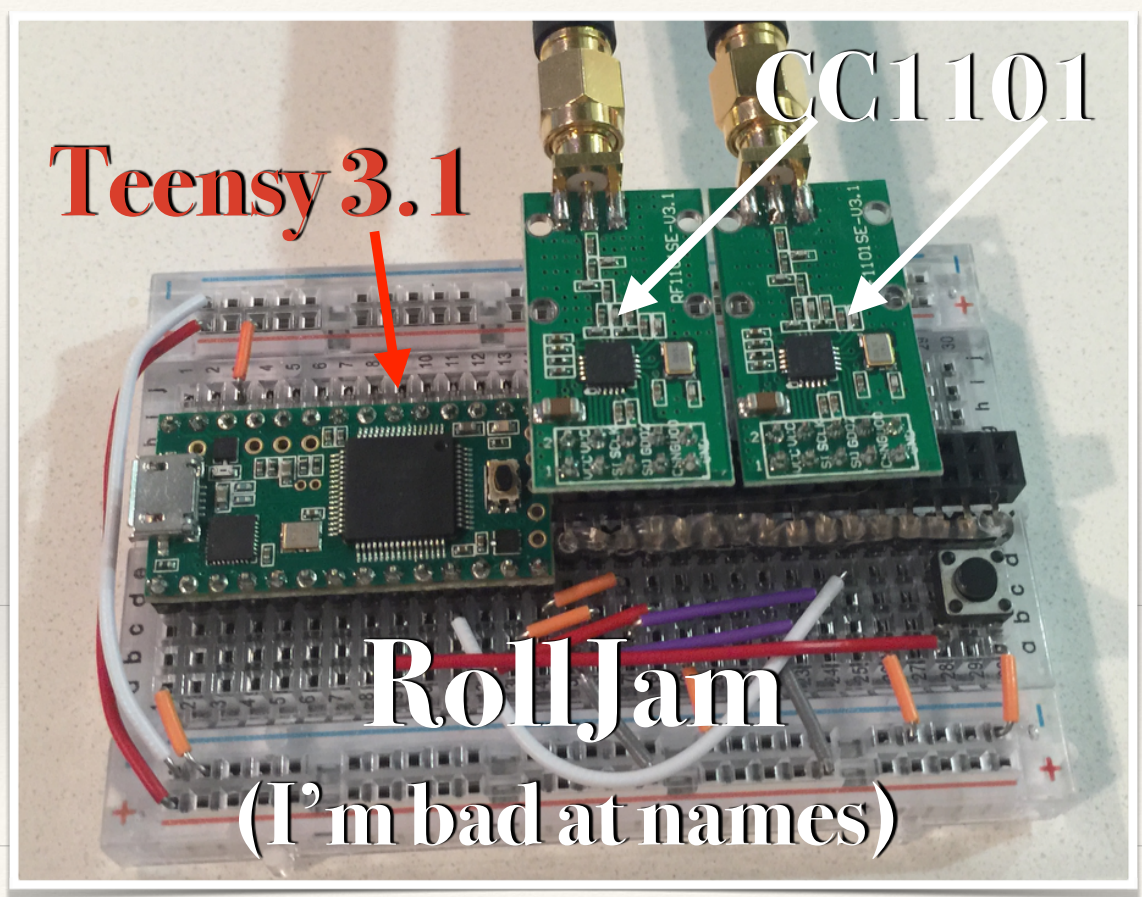
RollJam 하드웨어 사진을 보면 안테나가 두 개 달려 있습니다.
대부분의 구현은 TI CC1101 모듈 2개 + 마이크로컨트롤러(Teensy 3.1 등) 조합을 사용합니다.
역할 분담은 보통 이렇게 합니다.
- CC1101 #1 → RX 전용 (FOB 신호 캡처)
- CC1101 #2 → TX 전용 (Jamming + Replay)
하나의 RF 칩으로 “보내면서 들으려” 하면, PA(Power Amplifier) 출력이 LNA(Low Noise Amplifier)를 다 쓸어버리는 self-interference 문제가 생깁니다.
그래서 아예 물리적인 RF 체인을 분리해 버리는 거죠.
2.2.1 Jam 신호는 꼭 “정교한 노이즈”일 필요는 없다
RollJam에서 Jam의 목적은 “예쁜 노이즈(AWGN)를 생성하는 것”이 아닙니다. 목표는 훨씬 실용적이죠.
차량 수신기가 이번 버튼 입력을 ‘정상 프레임’으로 끝까지 처리하지 못하게 만들면 된다.
(프리앰블/동기 획득 → 복조 → 프레임 형식/CRC 검증 중 어디서든 실패하면 됨)
그래서 PoC 수준의 RollJam에서는 Jam 파형이 꼭 AWGN처럼 정교할 필요가 없습니다.
- 동일 채널(또는 매우 근접 채널)에서
- FOB 전송 타이밍에 맞춰
- 충분한 간섭 성분을 얹어
차량의 동기 획득이나 복조 파이프라인을 흔들기만 해도, 수신기는 프레임을 “깨진 신호”로 보고 버릴 가능성이 크게 올라갑니다.
다만 여기서 RollJam은 한 가지를 더 만족해야 합니다.
막는 동시에 캡처해서, 나중에 재생할 수 있을 정도의 신호 품질이 남아야 한다.
그래서 Jam을 “아무렇게나 세게” 때리면 차량뿐 아니라 공격자 캡처까지 같이 망가지고, 이 딜레마가 Jam & Capture를 구현 난이도 있게 만드는 핵심 요인 중 하나가 됩니다.
2.2.2 타이밍의 핵심: Preamble/Sync Word/Payload
FOB가 보내는 패킷 구조를 단순화하면:
- Preamble: 주기적인 0101… 패턴 (수신기 타이밍/AGC/클럭 동기 맞추기)
- Sync Word: “여기서부터 진짜 데이터 시작”을 알려주는 고유 패턴
- Payload: 롤링코드, 시리얼, 기능 비트 등
수신기 입장에서는, 이 순서를 따라갑니다.
- Preamble 비슷한 패턴이 일정 시간 이상 보이면 → “어, 뭔가 신호 온다”
- Sync Word가 정확히 매칭되면 → “오케이, 이제부터 데이터로 읽자”
- 그 다음 비트들을 샘플링/복원해서 Payload로 내보냄
RollJam이 Jam을 거는 타이밍은 대략 두 가지 전략이 가능합니다.
- Preamble부터 신나게 덮어버리기
- 차량 수신기가 Sync Word까지 제대로 못 보고 아예 패킷 인식 실패.
- 공격자는 좁은 대역폭/높은 감도로 Preamble+Payload를 최대한 복원.
- Preamble은 봐도 되는데, Sync Word/Payload를 깨버리기
- 차량은 “뭔가 신호는 온 것 같은데 이상해서 버림”.
- 공격자는 Preamble 이후 구간을 집중적으로 캡처/복조.
Samy의 PoC들은 이 부분을 정교하게 튜닝하기보다는
- “일단 신호 감지되면 바로 Jam 시작” → 끝날 때까지 유지
- 그 와중에 RX에서 최대한 패킷을 기록
하는 식의 보다 러프한 전략에 가깝습니다.
그래서 “얼마나 빨리 Jam을 때릴 수 있느냐”가 구현 난이도의 핵심입니다.
2.3 시나리오 기반 공격 단계 상세 – Jamming & Replay
이제 물리 계층 얘기를 들고, 실제 시나리오에 “타임라인”을 붙여보겠습니다.
- Ctr = 롤링코드 카운터 값
- Code A = Ctr = 100일 때 생성된 코드
- Code B = Ctr = 101일 때 생성된 코드
라고 할 때,
🎬 Scene 1: 첫 번째 버튼 – The Trap
- 시점 T0
- 피해자가 차량 앞에서 버튼을 한번 누릅니다.
- FOB:
- counter_fob: 99 → 100
- Code A 생성 후 전송
- RollJam:
- RSSI 모니터링 중 “갑자기 신호 세기 상승” 감지.
- 즉시 TX 체인으로 Jam 신호 발사.
- RX 체인은 가능한 좁은 대역/민감한 설정으로 패킷 전체를 캡처.
- 차량:
- Jam + FOB 신호가 섞인 걸 받아,
- Preamble/Sync를 제대로 인식하지 못하고 패킷을 버립니다.
- counter_car는 여전히 99에 머무릅니다.
- 결과:
- 사용자 입장: “어? 왜 안 열리지?”
- FOB: counter_fob = 100으로 올라간 상태 고정
- 공격자: Code A를 정상적으로 복원/저장해 둠 (아직 아무도 쓰지 않은 코드)
🎬 Scene 2: 두 번째 버튼 – The Exploit
- 시점 T1
- 피해자는 “아까는 잘 안 눌렸나 보다” 하고 다시 한 번 버튼을 누릅니다.
- FOB:
- counter_fob: 100 → 101
- Code B 생성 후 전송
- RollJam:
- 다시 RSSI 상승 → Jam 시작
- RX로 Code B 캡처
- Code B 기록이 끝난 직후,
- Jam을 아주 짧은 순간 멈추거나 줄인 뒤,
- Code A를 차량 쪽으로 재생(Replay)
- 차량:
- counter_car = 99 상태에서 Code A 수신
- 복호화/검증 결과:
- Ctr_rx = 100 → “마지막으로 본 99보다 크고, 허용 윈도우 안”
- → 유효한 코드로 판단 → 문을 열어줌
- counter_car를 100으로 업데이트
- 결과:
- 사용자 입장:
- “이번에는 잘 됐네”
- 두 번째 눌렀을 때 문이 열렸으니 아무 의심 없이 지나감
- 공격자 입장:
- Code A는 이제 사용됨 → 폐기
- Code B는 아직 차량이 본 적 없는, 미래의 유효 코드로 남아 있음
- 사용자 입장:
🎬 Scene 3: 공격자의 이득 – The Future Code
- 시점 T2 (나중에, 아무 때나)
- 피해자는 차를 타고 이동/주차/귀가 → 차를 세워둡니다.
- 공격자는 차량 근처로 와서 Code B를 재생합니다.
- 차량:
- 현재 counter_car = 100
- Code B는 Ctr = 101 → 허용 윈도우 내의 “다음 코드”
- → 아무 의심 없이 문을 열어줍니다.
이 과정을 한 번만 성공해도, 공격자는 “언제든 한 번 차를 열 수 있는 권한”을 얻습니다.
장치를 계속 붙여놓고 반복하면, 유효 코드를 여러 개 확보하는 것도 가능합니다.

2.4 Samy Kamkar PoC 구현 분석 – 하드웨어 & 상태 머신
이제 RollJam PoC를 하드웨어/소프트웨어 관점에서 뜯어보겠습니다.
공개된 PoC는 깃허브에 있으니 참고하셔서 보시면 좋을 것 같습니다.
2.4.1 하드웨어 구성 (BOM 관점)
Samy가 DEF CON 23에서 소개한 RollJam의 핵심은 “싼 부품으로도 된다”였습니다.
대표적인 구성은 다음과 같습니다.
- Controller
- Teensy 3.1 / 3.2 (Arduino 호환, 32-bit MCU, 상대적으로 빠른 클럭)
- RF Module
- TI CC1101 RF 트랜시버 모듈 × 2
- 하나는 RX 전용
- 하나는 TX(Jamming + Replay) 전용
- TI CC1101 RF 트랜시버 모듈 × 2
- Antenna
- 315 MHz 또는 433 MHz 대역용 와이어 안테나 혹은 작은 모노폴/다이폴
- 기타
- 배터리 팩, 케이스 (동전 지갑 사이즈 정도), 스위치 등
코스트:
- 전체 BOM을 2015년 기준으로 잡으면, 30~40달러 수준에서 구현 가능했다고 소개됩니다.
여기서 강조하고 싶은 포인트는:
“이건 고가의 SDR 장비나 특수 하드웨어가 아니라, 취미용 RF 모듈과 소형 MCU로도 충분히 가능한 공격이다.”
라는 메시지입니다.
2.4.2 CC1101가 왜 많이 쓰였는가?
TI CC1101는 Sub-GHz 범용 RF 트랜시버로, 다음 같은 특징이 있습니다.
- 주파수: 300~348 MHz, 387~464 MHz, 779~928 MHz 지원
- 변조: 2-FSK, GFSK, ASK/OOK 등
- 패킷 엔진:
- Preamble/Synch Word 검출
- 자동 패킷 길이 처리
- CRC, 주소 필터링 등
- 설정 가능한 파라미터:
- 대역폭(BW)
- 데이터율(Baud Rate)
- 출력 파워
- RSSI 측정, LQI 등
공격자 입장에서는,
- 합법 장비처럼 보이는 “범용 RF 칩”을
- 약간 다른 설정(필터 해제, 프라미스큐어스 모드 등)으로 사용하여 패킷을 “말 그대로 다 받아 보는” 스니퍼로 쓸 수 있습니다.
RollJam은 이 칩을 하나는 “듣는 용”, 하나는 “막고/재생하는 용”으로 써서 논리적으로 “듣는 동시에 막기”를 구현한 셈입니다.
2.4.3 소프트웨어 로직: 상태 머신(FSM) 관점
Samy의 PoC 코드는 구조적으로 보면 Finite State Machine(FSM) 입니다.
대표적인 상태들을 나열해 보면:
- IDLE
- 아무 신호도 없을 때 대기 상태
- RX 체인은 RSSI를 모니터링하며 “신호가 올라오나” 감시
- JAM_AND_CAPTURE_FIRST
- 첫 번째 FOB 신호(Code A) 감지
- TX 체인: Jam 신호 발사
- RX 체인: 패킷 전체를 버퍼에 기록
- 패킷이 끝났다고 판단되면:
- storedCodes[0] = Code A
- 상태를 WAIT_SECOND로 이동
- WAIT_SECOND
- “사용자가 한 번 더 누를 때까지” 대기
- 다시 RSSI 모니터링 → 두 번째 신호 감지
- JAM_AND_CAPTURE_SECOND
- 두 번째 FOB 신호(Code B) 감지
- TX: Jam 신호 발사
- RX: Code B 버퍼에 기록
- 패킷 끝 감지 후:
- storedCodes[1] = Code B
- 상태를 REPLAY_FIRST로 이동
- REPLAY_FIRST
- TX 체인으로 storedCodes[0] (Code A)를 차량에 전송
- 이때 Jam을 끄거나 강도를 낮춰 차량이 코드 A를 제대로 받게 한다.
- 이후 ATTACK_READY로 이동
- ATTACK_READY
- 이제 공격자는 storedCodes[1] (Code B)를 들고 있는 상태
- 별도의 트리거(시간/버튼/원격 명령 등)에 따라
- Code B를 재생할 수 있는 “준비 완료” 상태
이걸 아주 압축한 형태의 의사코드로 쓰면 대략:
loop() {
switch (state) {
case IDLE:
if (RSSI_rx > TH1) {
start_jamming();
start_recording();
state = JAM_AND_CAPTURE_FIRST;
}
break;
case JAM_AND_CAPTURE_FIRST:
if (packet_end_detected()) {
stop_jamming();
storedCodes[0] = recorded_packet;
state = WAIT_SECOND;
}
break;
case WAIT_SECOND:
if (RSSI_rx > TH1) {
start_jamming();
start_recording();
state = JAM_AND_CAPTURE_SECOND;
}
break;
case JAM_AND_CAPTURE_SECOND:
if (packet_end_detected()) {
stop_jamming();
storedCodes[1] = recorded_packet;
state = REPLAY_FIRST;
}
break;
case REPLAY_FIRST:
// 잠깐 Jam을 멈추거나 줄이고
transmit(storedCodes[0]); // Code A
state = ATTACK_READY;
break;
case ATTACK_READY:
// 나중에 원할 때 storedCodes[1] (Code B)를 재생
break;
}
}
여기서 중요한 건, 이게 “정교한 RF DSP”가 아니라
“RSSI 상승 감지 → Jam ON → 패킷 끝날 때까지 기록 → Jam OFF”라는
상대적으로 단순한 FSM으로도 충분히 구현된다는 점입니다
2.4.4 “왜 타이밍이 이렇게까지 중요하냐”
꼭 한 번 짚고 넘어가면 좋은 포인트입니다.
- 너무 늦게 Jam을 때리면?
- 차량이 이미 Preamble/Sync Word를 보고, Payload 일부까지 읽었을 수 있습니다.
- 이 경우 일부 차량 구현에서는 “이상한 패킷”으로 로그를 남기거나, 특정 상황에서 방어 로직(예: Anti-DoS)을 작동시킬 수도 있습니다.
- 너무 일찍, 너무 오래 Jam을 때리면?
- 사용자가 버튼을 여러 번 눌러도 계속 “안 된다”라고 느껴서 수상함을 느낄 수 있습니다.
- 공격자가 원하는 건 "한 번 안 됐다가, 바로 다음 눌렀을 때 되는 경험”입니다.
그래서 PoC 구현에서는 보통:
- CC1101의 GDO0/2 핀에 인터럽트를 걸어
- 특정 신호(예: Sync Word 검출, 패킷 시작 등)를 트리거로
- 수 밀리초 수준의 Latency로 Jam을 시작/종료하게 하고,
- FOB의 데이터율(예: 2~4 kbps) + 패킷 길이(수십~수백 비트) 를 기준으로 “대충 이 정도 시간 동안만 Jam을 유지하면 된다”는 경험적 값으로 튜닝하는 식으로 구현합니다.
2.5 RollJam이 성공하는 구조적 이유 – 프로토콜 레벨 요약
마지막으로, “왜 제조사들이 이런 공격에 취약했나?”를 정리해 보면:
- 단방향성(One-Way RKE)
- 차량은 FOB에게 “너 방금 보낸 100번 코드 잘 받았고, 이제 101번을 기다릴게”라고 알려주지 않습니다.
- FOB는 본인 카운터만 올리고, 차량이 실제로 받았는지 모릅니다.
- RollJam은 이 상태 비동기(State Desynchronization)를 강제로 유도합니다.
- 허용 윈도우(Window)의 역습
- 사용자의 실수/주머니 클릭을 커버하기 위해 도입한 “Look-ahead Window”가, 공격자에게는 “훔친 미래 코드(Code B)를 합법적으로 승인해 주는 백도어”가 됩니다.
- 차량 입장에서는:
- “아, 이건 아마도 사용자가 예전에 멀리서 눌렀던 값이겠지.”
- → 정상적인 미래 코드로 승인
- (세대/제조사별 편차) Jam 상황이 “사용자 경험”에서 명확히 드러나지 않을 수 있음
- Jam이 걸리면 차량은 결과적으로 “유효 프레임을 못 받는 상황”이 됩니다.
- 이때 많은 사용자는 단순히 “한 번 더 누르면 되겠지”로 행동하고, RollJam은 바로 그 행동 패턴을 공격 체인에 편입합니다.
- 즉, 방어가 강한 구현에서는 간섭을 탐지/대응할 수 있지만, 그렇지 않은 구현에서는 “수신 실패가 경험으로 흡수”되면서 공격 성공 확률을 올리는 방향으로 작동합니다.
- 사용자 경험/심리에 너무 기대는 방어 모델
- 사람은 “한 번 안 되면 다시 누른다”는 패턴을 너무 자연스럽게 가지고 있습니다.
- RollJam은 이 심리를 공격 체인에 그대로 넣어버립니다.
- 결과적으로:
- 사용자: “아, 아까는 잘 안 눌렸나 보다.”
- 차량: “100, 그다음 101… 정상 시퀀스네?”
- 공격자: “아무도 모르게 101을 들고나감.”
✅ 마무리: “아이디어”가 “장치”가 되는 구간
오늘은 RollJam의 아이디어를 실제 장치로 내리기 위해 반드시 넘어야 하는 관문,
즉 Jam & Capture의 모순을 어떻게 푸는지를 다뤘습니다.
정리하면:
- 차량이 보는 신호와 공격자가 보는 신호는 동일하지 않다(비대칭 조건 형성)
- self-interference 때문에 한 칩으로 동시 처리가 어렵고, 그래서 RX/TX 체인을 분리한다
- 실제 구현은 “DSP 천재”가 아니라 FSM + 타이밍 + 버퍼 처리가 승부처다
그리고 여기까지 이해되면, 다음 질문이 자연스럽게 나옵니다.
“그럼 요즘 차들은 왜 이게 잘 안 먹히지?”
“그래서 RollBack / RollCAN은 뭘 바꿔서 다시 성립시키지?”
🔜 다음 편 예고 (Part 3: RollJam 확장)
다음 글(Part 3)에서는:
- 일부 현대 구현에서 RollJam이 어려워지는 이유(설계 가정 변화)
- 그걸 우회하려는 변종들이 어떤 발상을 했는지
- 특히 RollBack(시간 비의존적 리플레이) 이 “어떤 전제를 뒤집었는지”
를 RollJam과 대비시키면서 정리할 예정입니다.
오류나 질문이 있으시다면 댓글로 남겨주세요.
긴 글 읽어주셔서 감사합니다!
📚 참고자료
[Original / Talk]
- Samy Kamkar, “Drive It Like You Hacked It” (DEF CON 23) (Video Archive / Index)
[Popular / Context]
- WIRED (2015), “This Hacker's Tiny Device Unlocks Cars And Opens Garages”
[Datasheet / Vendor Docs]
- Texas Instruments, CC1101 Low-Power Sub-1GHz RF Transceiver Datasheet (SWRS061)
- (CC1101 레퍼런스/클래스 문서, 핀/커맨드/표 참조용)
- Microchip, HCS301 KeeLoQ Code Hopping Encoder Datasheet (DS21143)
- Microchip HCS301 Product Page
[Hands-on / Blog (2차 자료)]
- HandsOn Security (s34s0n), “Jam and Replay Attacks on Vehicular Keyless Entry Systems”
[Follow-up / Extensions]
- Csikor et al., “RollBack: A New Time-Agnostic Replay Attack Against the Automotive RKE Systems” (ACM)
[Code / PoC 참고(구조 이해용)]
- RollJam PoC (CC1101 기반) 저장/재생 흐름 참고
'Hacking > Automotive' 카테고리의 다른 글
| 3. RollJam 확장 & 마무리 (1) | 2025.12.27 |
|---|---|
| 1. RollJam이란? (1) | 2025.12.13 |